DIY Retracts
When looking at the possibility of building the Welkin, one of the first areas of concern was the need for retracts. I was surprised to find that the readily available commercial units all seemed to be designed for sideways retraction whereas on the Welkin (and indeed on most twin-engined aircraft) the undercarriage legs retract rearwards. This of course means that fore and aft landing shocks are transmitted directly to the locking mechanism and my local model shop was not able to re-assure me that any of the units they stocked had locking mechanisms designed to withstand this.
The drawing on the right, drawn for Ivan by Hal Norrish, shows the principle of operation. (click on it to view it in full in a separate window)
The key to the mechanism is the operating crank which runs in a slot formed by making a hairpin bend in the top part of the leg. Indeed, making this hairpin bend is really the only metalworking challenge in the whole thing! If you look at the bottom three views on Hal's drawing you will see that, both in the retracted and fully extended positions, the crank arm is at right angles to the slot so that shock loads on the wheel cannot apply any turning force to the crank and hence to the operating servo.
Although the undercarriage leg was now longer, it looked as if it should still be possible to accommodate the retracted wheel in the nacelle, so I pressed ahead and built a rough mockup of this arrangement and, just to test it out, mounted a micro servo in front of the bulkhead to operate the crank. |
||
 Whilst contemplating this problem, my attention was drawn to a design for DIY retracts by
Whilst contemplating this problem, my attention was drawn to a design for DIY retracts by 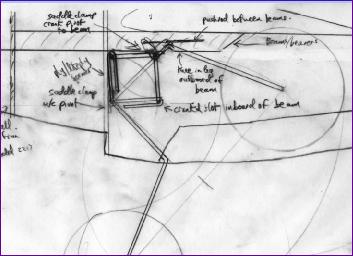 The first snag was that the full size Welkin drawing shows a retract angle in excess of 150 degrees which is simply not achieveable with this mechanism. After a bit of doodling though, I was able to find a position for the pivot which would reduce the retract angle to 90 degrees and still preserve the scale angle of the visible part of the undercarriage leg.
The first snag was that the full size Welkin drawing shows a retract angle in excess of 150 degrees which is simply not achieveable with this mechanism. After a bit of doodling though, I was able to find a position for the pivot which would reduce the retract angle to 90 degrees and still preserve the scale angle of the visible part of the undercarriage leg.
|
||||
|
||||||||
 1. Choose wire that is strong enough for the job - but not beyond your wire-bending capability! I used 3mm wire which has proved to be about right. Even so, making the hairpin bends was a bit of a challenge and so I made them a bit over-long and 'fine tuned' the end of the hairpin with an epoxy fillet as shown in the picture.
1. Choose wire that is strong enough for the job - but not beyond your wire-bending capability! I used 3mm wire which has proved to be about right. Even so, making the hairpin bends was a bit of a challenge and so I made them a bit over-long and 'fine tuned' the end of the hairpin with an epoxy fillet as shown in the picture.